
A Piece of History: The Canadian Chronometric Radiosonde
– By Kenneth A. Devine –
While temperature profiles to the tropopause had been conducted in Canada for research purposes starting in 1911 (Devine & Strong, 2009), operational upper air systems did not become available until 1929 with the introduction of the radiosonde which had a built in radio transmitter. The radiosonde gave the meteorologist a three dimensional view in real time of the atmosphere which remains the critical element for forecasting. The first operational upper air station of the Meteorological Service of Canada (MSC) was opened in Gander, Newfoundland in 1941 (Thomas, 2001) using the Canadian radiosonde system. Eventually only eight stations – Aklavik, Baker Lake, Coppermine, Fort Smith, Port Hardy, Sable Island, The Pas and the Pacific Weather Ship (PAPA) – used these Canadian designed radiosondes (Bindon, 1953). The other upper air stations in Canada used the American audio modulated radiosonde system.
The Canadian radiosonde (Figure 1) was a chronometric radiosonde (Middleton & Sphilaus, 1953) which depended upon an accurate motor speed since the value of each measurement was determined by timing. The 1500 rotations per minute (rpm) motor was geared down by a ratio of 1:343 to slowly rotate an anodized aluminum disk which had a spiral slot impressed upon it. Above the rotating spiral disk were four contactors for: pressure (right, off the picture), temperature (upper left), humidity (left), and reference (center bottom). A single aneroid cell moved the pressure contactor arm. The temperature arm was deflected by a short bimetal sensor made of nickel steel and Invar. Initially, the humidity arm had used a human hair sensor but by 1947 a goldbeater skin (intestine) was being used, as it was more sensitive and responsive at cold temperatures. During the preflight calibration, which is called the baseline check, the humidity sensor had to be exercised by breathing on it until the recorder indicated 100% (MSC, 1946).
The fixed reference arm marked the beginning and end of each half rotation of the disk. The reference signals were manually synchronized with the base station recorder (Figure 2) speed in order to compensate for any gradual change in the motor speed during the flight.
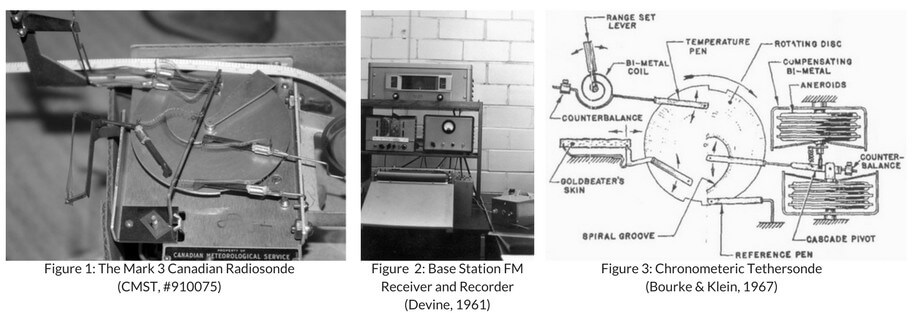
The published limits of the sensor accuracy was ±0.2°C for temperature (+35 to -75°C), ±1% for humidity, and ±2 hPa for pressure (Latimer & Dickson, 1957). The 1957 Mark 3 version of the radiosonde (Figure 1) had two temperature elements: one was nickel plated and the other was black. This was changed in the 1958 Mark 3(S) to a single bimetal element in a shielded duct for which solar radiation corrections were applied (MSC, 1958).
The radiosonde motor was developed by Ratje Jacobsen who modified a commercial midget direct current motor in 1937 (Jacobsen, 1939). A vibrator controlled the rotation rate of a magnet on the motor shaft by alternately switching off and on the battery voltage to a fixed coil as the shaft rotated. Once started, the magnet on the motor shaft continued to rotate at a rate of about 1500 rpm. This “hit-and-miss” motor, which rotated the spiral via the gearing, dates from the time of Michael Faraday. Jacobsen weighted the phosphor bronze vibrator so that it oscillated at a very constant rate like a watch. As a result the motor speed was quite accurate and the disk rotated at a constant rate in about fourteen seconds.
Based on this radiosonde, a tethersonde was developed for profiling the first 500 metres of the atmosphere for research purposes (Figure 3). The tethersonde was lifted by a small helium filled balloon (kytoon) which was shaped like a dirigible whose speed of ascent was controlled by a winch on the ground. This sonde was virtually identical to the operational radiosondes used to measure profiles up into the stratosphere. The main change was the use of six rather than a single aneroid cell to handle the smaller pressure changes near the surface. The temperature sensor was also changed from a short bimetal strip to a bimetal coil, again to handle the minute changes within the first 500 metres. The motor, disk and humidity sensor were not changed. A special audio modulated version of the tethersonde was developed by MSC in the later 1960s.
This chronometric radiosonde was typical of the radiosondes developed during the 1930s, and while ingenious they were mostly mechanical. Remnants of these mechanical subsystems would remain in radiosondes worldwide until the 1990’s. The Canadian radiosonde was last used operationally on Ocean Station PAPA in 1963. As many as one hundred thousand of these radiosondes may have been used during its twenty-two year operational life.
References:
Bindon, H.H., 1953, Developments in the Canadian Radiosonde, Royal Meteorological Society – Canadian Branch, Volume 4
Bourke, R.S., and Klein, G.L., 1967, The Chronometric Tethersonde, Description and Operation, J.App.Met, p419, Vol.6
CMST, #910075, Canadian Museum of Science and Technology, Canadian radiosonde: archive number 910075
Devine, K.A. and Strong, G.S., 2009, The First Tropospheric Temperature Profile in Canada, CMOS Bulletin, Vol.37, No.5, October
Jacobsen R.C., 1939, A Speed – Governed Midget Electric Motor, Review of Scientific Instruments, page 315, Volume 10, October
Latimer, J.R. & Dickson, J.S., 1957, The Canadian Radiosonde and Rawinsonde System, Meteorological Service of Canada, Instrument Manual 91, MSC Circular 2877, Toronto
Middleton, W.E. Knowles and Spilhaus, Athelstan F., 1953, Meteorological Instruments, University of Toronto Press, Third Edition, Toronto
MSC, 1946, The MSC Radiosonde (and how to use it), Radiosonde Circular 2, MSC Circular 892, Meteorological Branch (MSC), Toronto
MSC, 1958, Summary of Radiosonde Observation in Canada
Thomas, Morley, 2001, Metmen in Wartime – Meteorology in Canada 1939-1945, CW Press, Toronto
About the Author: Ken Devine

Ken began his career as an observer and Officer-in-Charge at remote upper air stations. Later he worked three years as a senior electronics technician which included installing the first operational weather stations in Canada. After obtaining his degree and completing the meteorologist training in 1971, he spent four years forecasting on the east coast before moving to headquarters. In Toronto he worked in instrument development, project management, Field Services and finally as Superintendent of Climate Standards. After retiring in 1998 he has been researching and writing articles on the history of meteorological instruments in Canada.